Plot the state-expanded hypergraph of the MDP.
Usage
# S3 method for class 'HMDP'
plot(x, ...)Arguments
- x
The MDP model.
- ...
Arguments passed to
plot_hypergraph().
See also
get_hypergraph() and plot_hypergraph() for possible arguments.
Examples
## Set working dir
wd <- setwd(system.file("models", package = "MDP2"))
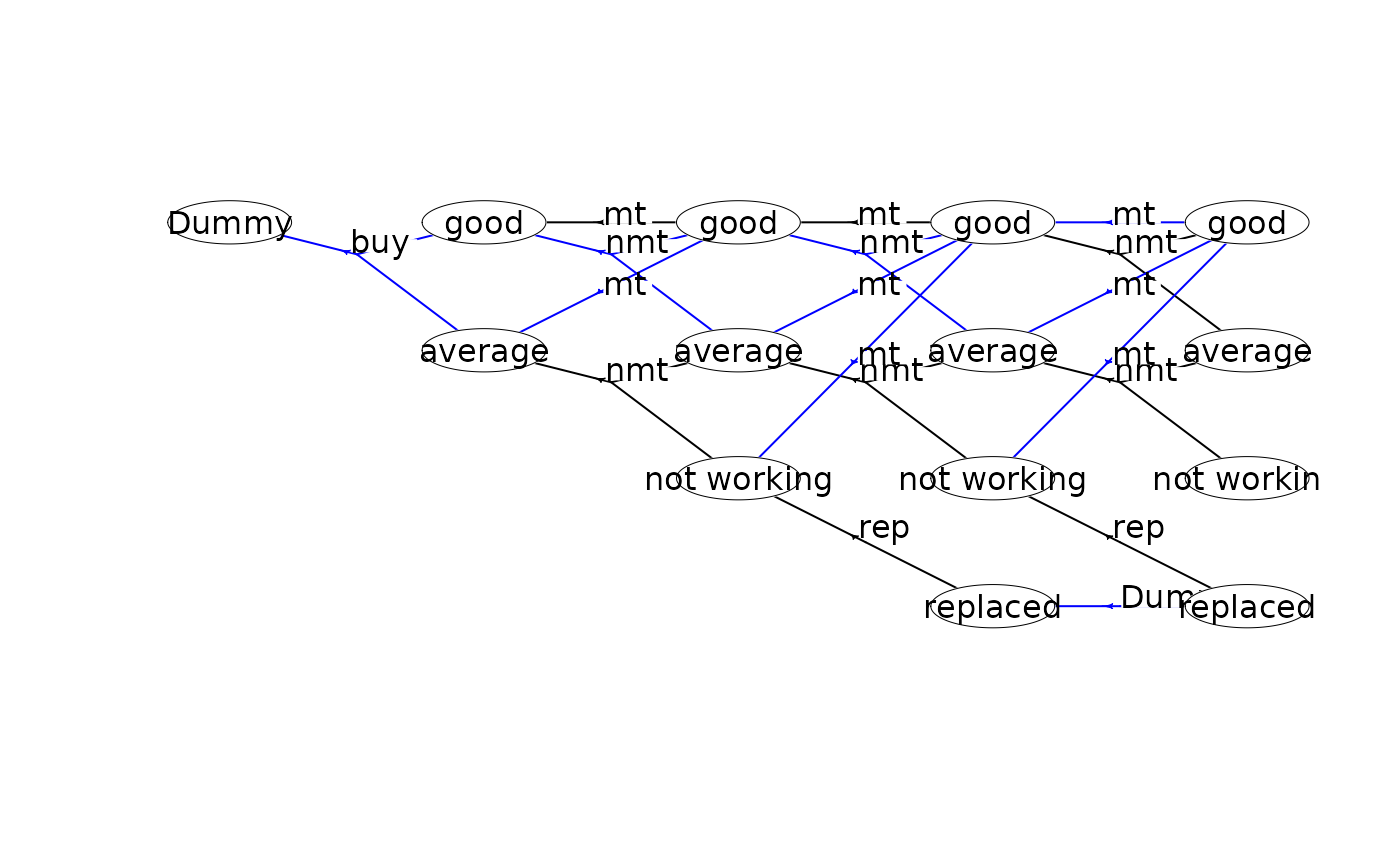
#### A finite-horizon replacement problem ####
mdp<-load_mdp("machine1_")
#> Read binary files (0.000121964 sec.)
#> Build the HMDP (3.9059e-05 sec.)
#> Checking MDP and found no errors (1.262e-06 sec.)
plot(mdp)
 plot(mdp, action_color = "label") # colors based on labels
plot(mdp, action_color = "label") # colors based on labels
 plot(mdp, trans_labels = "state") # label transitions with target state labels
plot(mdp, trans_labels = "state") # label transitions with target state labels
 plot(mdp, trans_labels = "prob") # label transitions with transition probabilities
plot(mdp, trans_labels = "prob") # label transitions with transition probabilities
 plot(mdp, action_color = "label", state_label = "s_id|label") # state labels are 's_id | label'
plot(mdp, action_color = "label", state_label = "s_id|label") # state labels are 's_id | label'
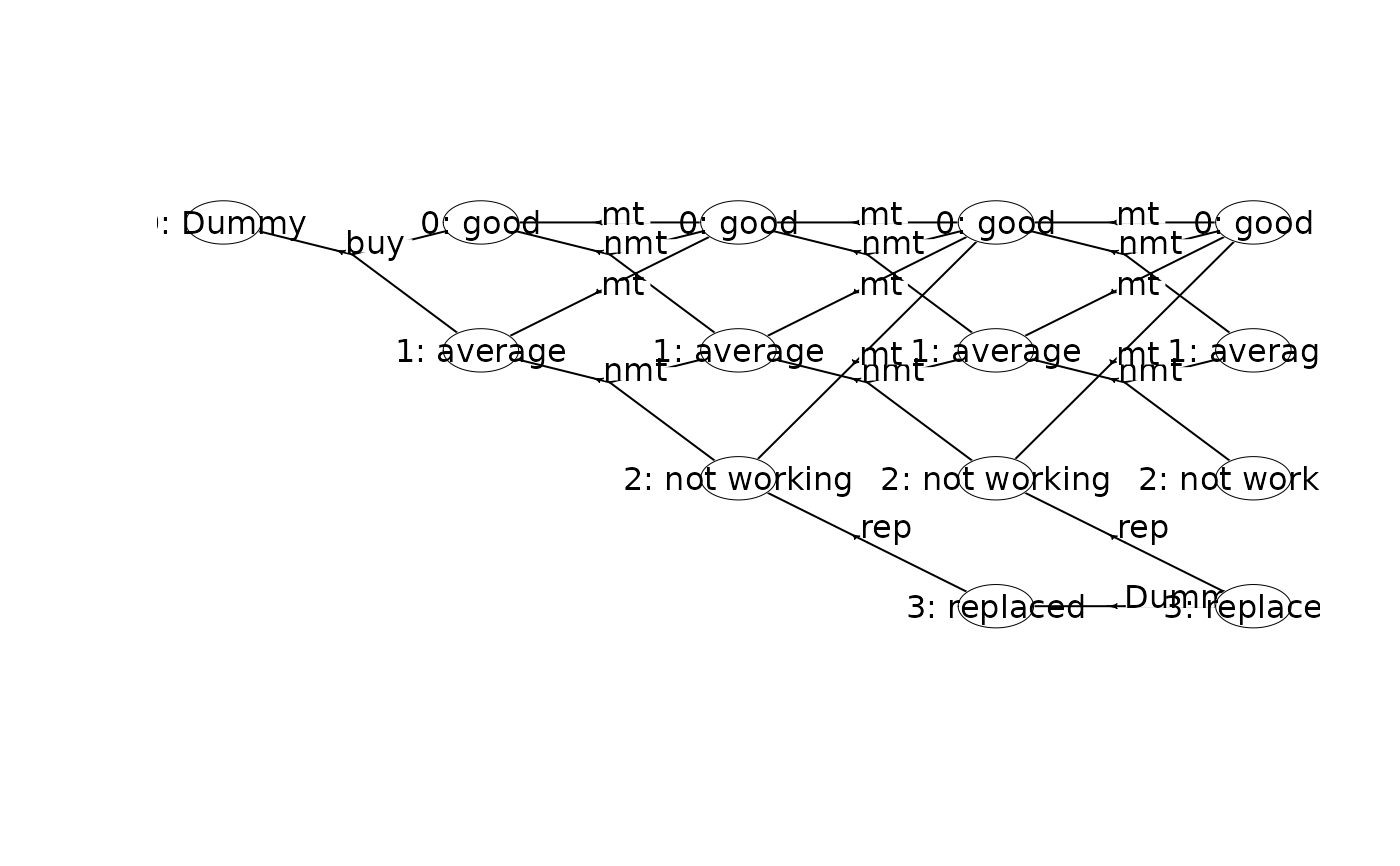
 plot(mdp, state_label = "s_idx|label", radx = 0.01) # adjust radx in states
plot(mdp, state_label = "s_idx|label", radx = 0.01) # adjust radx in states
 plot(mdp, state_label = "label", action_w_label = "none", action_label = "label",
trans_labels = "s_id", radx = 0.01)
plot(mdp, state_label = "label", action_w_label = "none", action_label = "label",
trans_labels = "s_id", radx = 0.01)
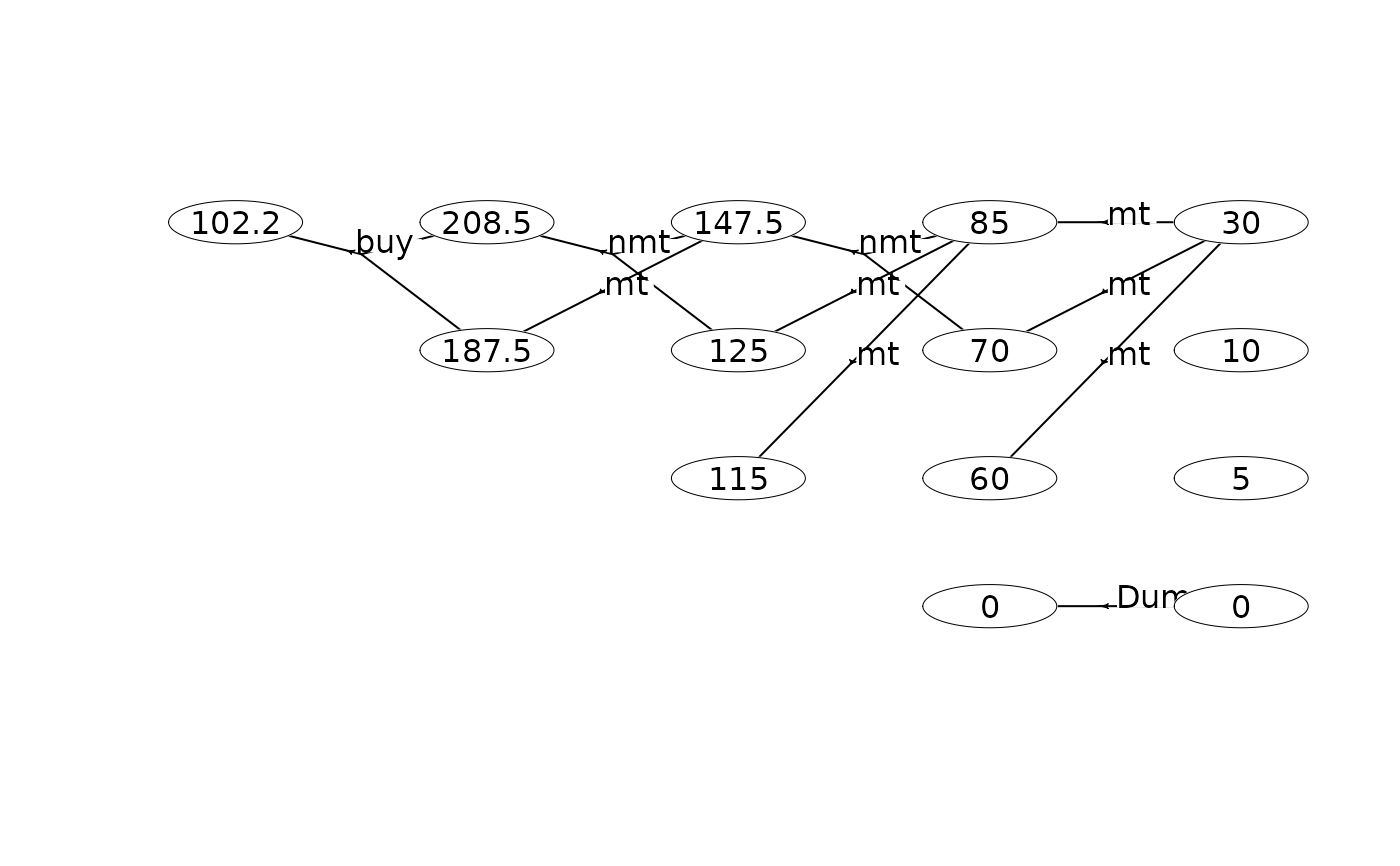
 scrapValues <- c(30, 10, 5, 0) # scrap values (the values of the 4 states at stage 4)
run_value_ite(mdp, "Net reward" , term_values = scrapValues)
#> Run value iteration with epsilon = 0 at most 1 time(s)
#> using weight 'Net reward' under expected-weight Bellman operator.
#> Finished. Cpu time 8.493e-06 sec.
plot(mdp, action_color = "policy") # highlight optimal policy
scrapValues <- c(30, 10, 5, 0) # scrap values (the values of the 4 states at stage 4)
run_value_ite(mdp, "Net reward" , term_values = scrapValues)
#> Run value iteration with epsilon = 0 at most 1 time(s)
#> using weight 'Net reward' under expected-weight Bellman operator.
#> Finished. Cpu time 8.493e-06 sec.
plot(mdp, action_color = "policy") # highlight optimal policy
 plot(mdp, actions_visible = "policy", state_label = "weight") # show only optimal policy
plot(mdp, actions_visible = "policy", state_label = "weight") # show only optimal policy
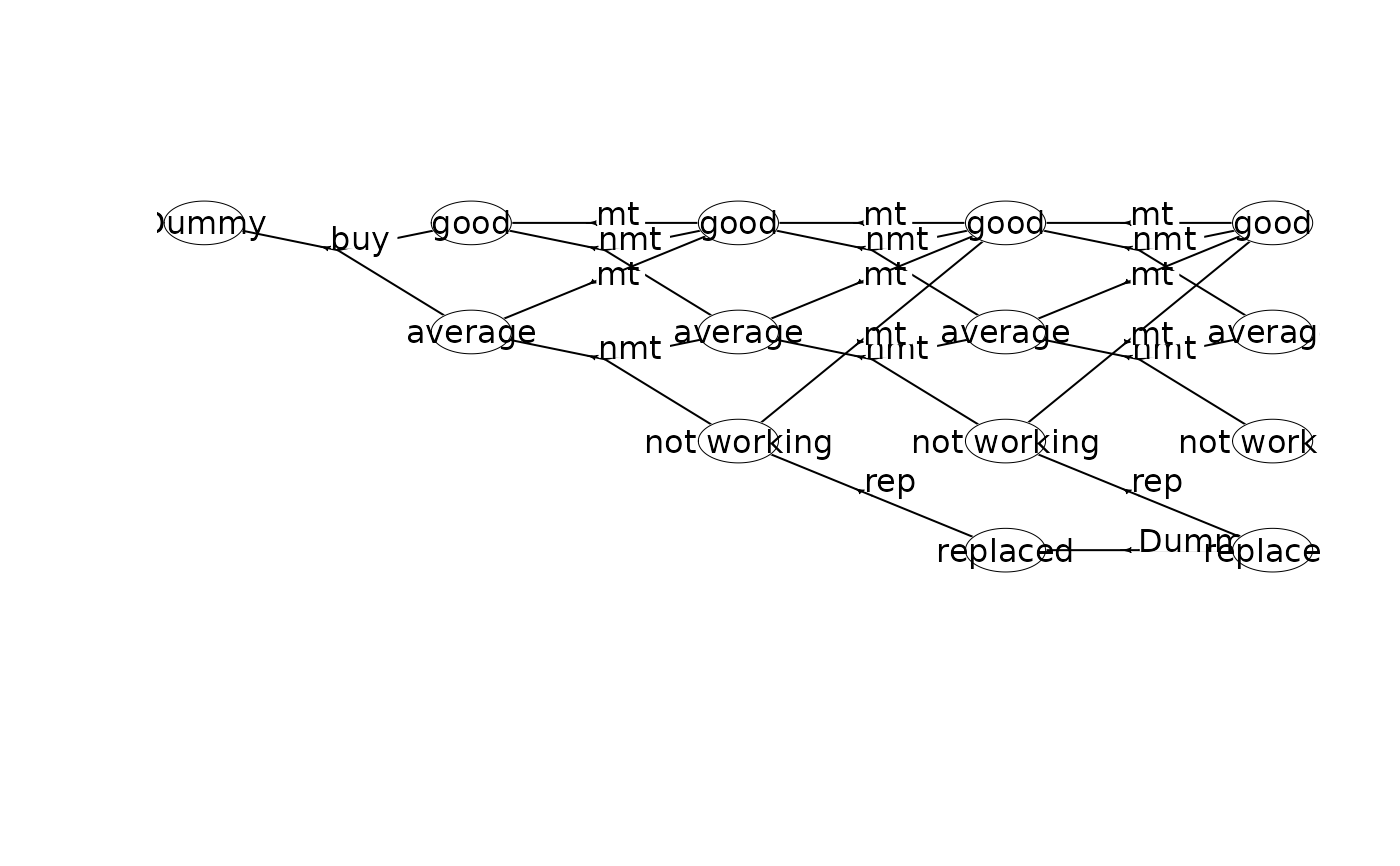
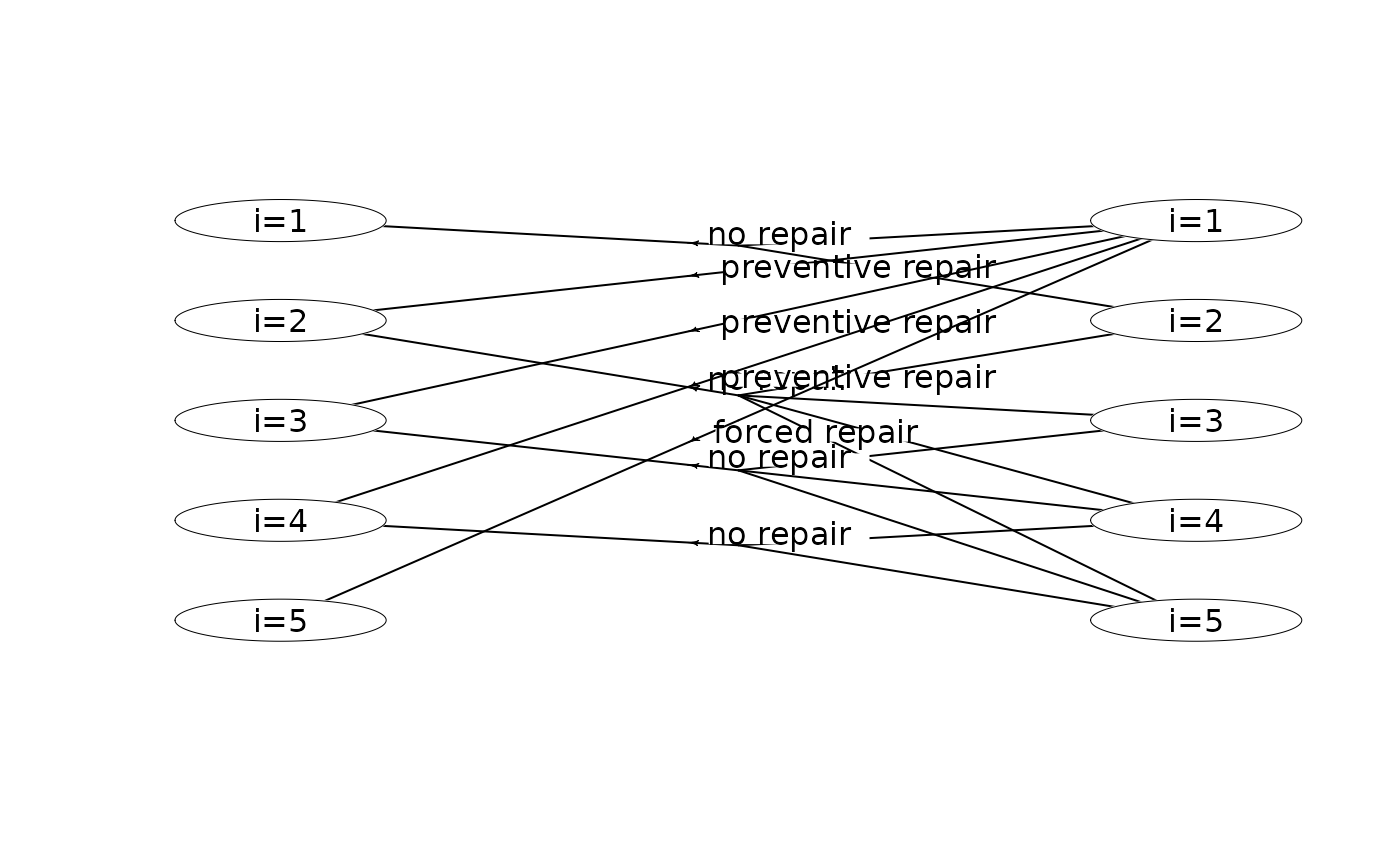
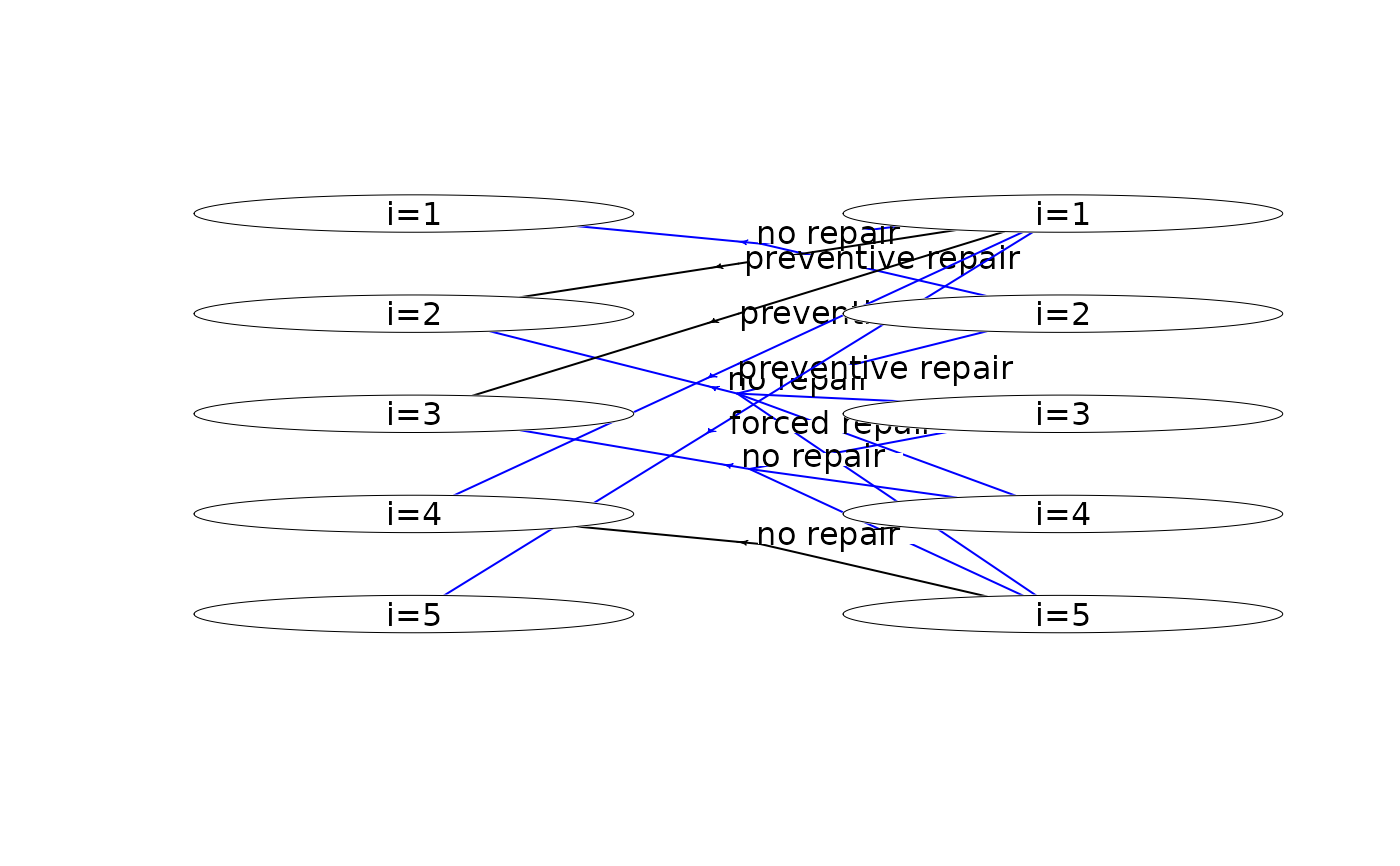
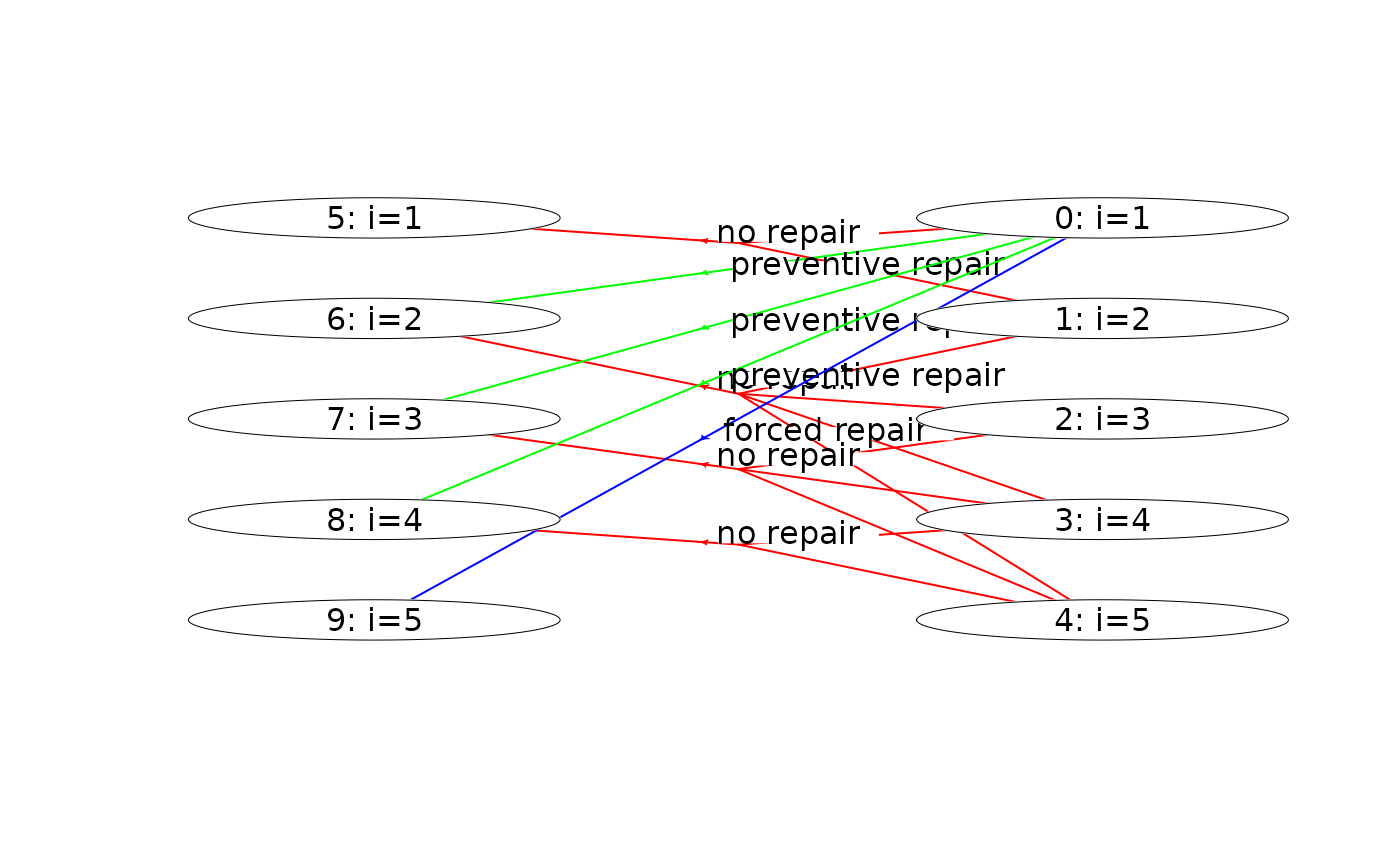 #### An infinite-horizon maintenance problem ####
mdp<-load_mdp("hct611-1_")
#> Read binary files (0.000120212 sec.)
#> Build the HMDP (2.9023e-05 sec.)
#> Checking MDP and found no errors (1.172e-06 sec.)
plot(mdp) # plot the first two stages
#### An infinite-horizon maintenance problem ####
mdp<-load_mdp("hct611-1_")
#> Read binary files (0.000120212 sec.)
#> Build the HMDP (2.9023e-05 sec.)
#> Checking MDP and found no errors (1.172e-06 sec.)
plot(mdp) # plot the first two stages
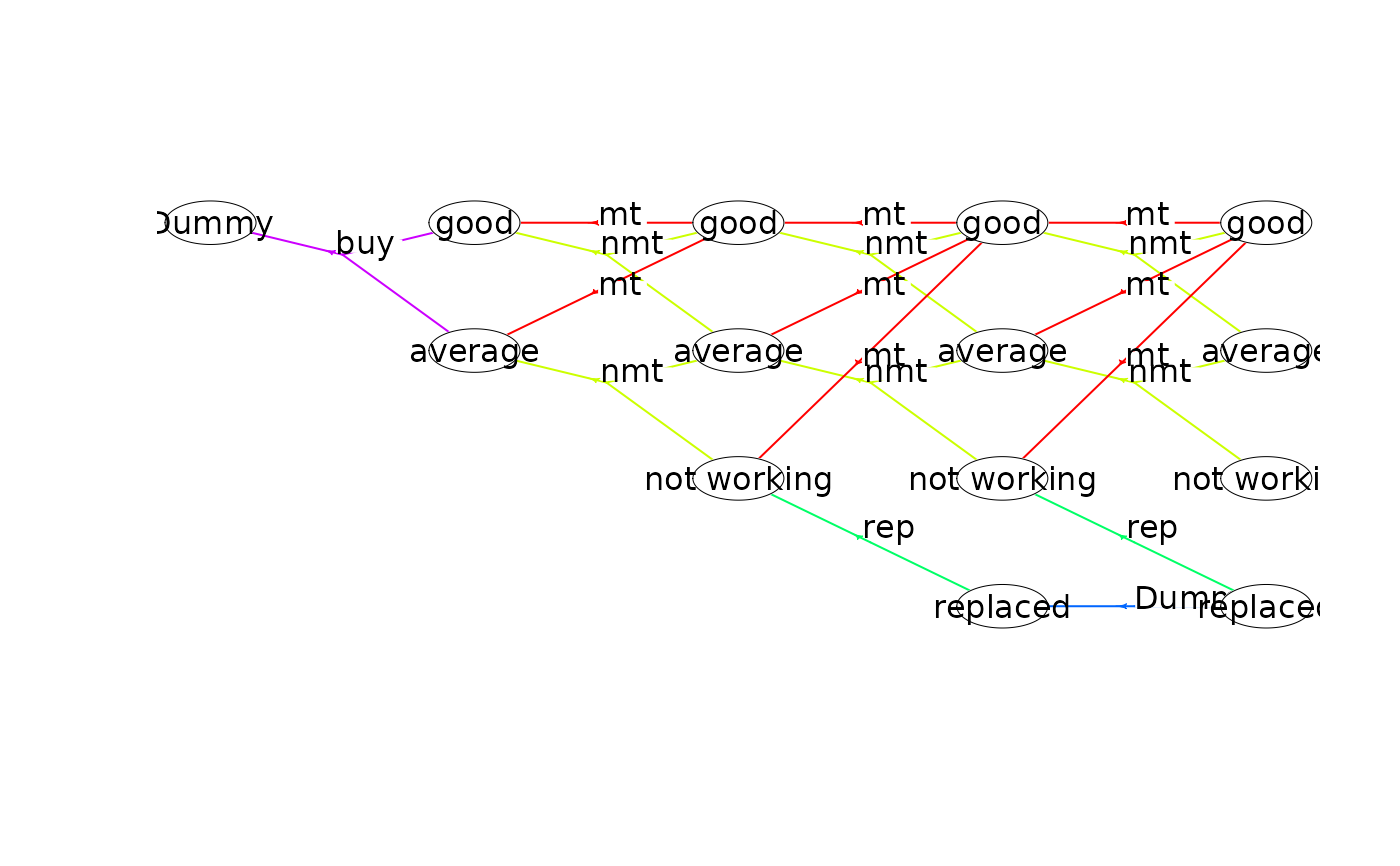
 plot(mdp, action_color = "label") # colors based on labels
plot(mdp, action_color = "label") # colors based on labels
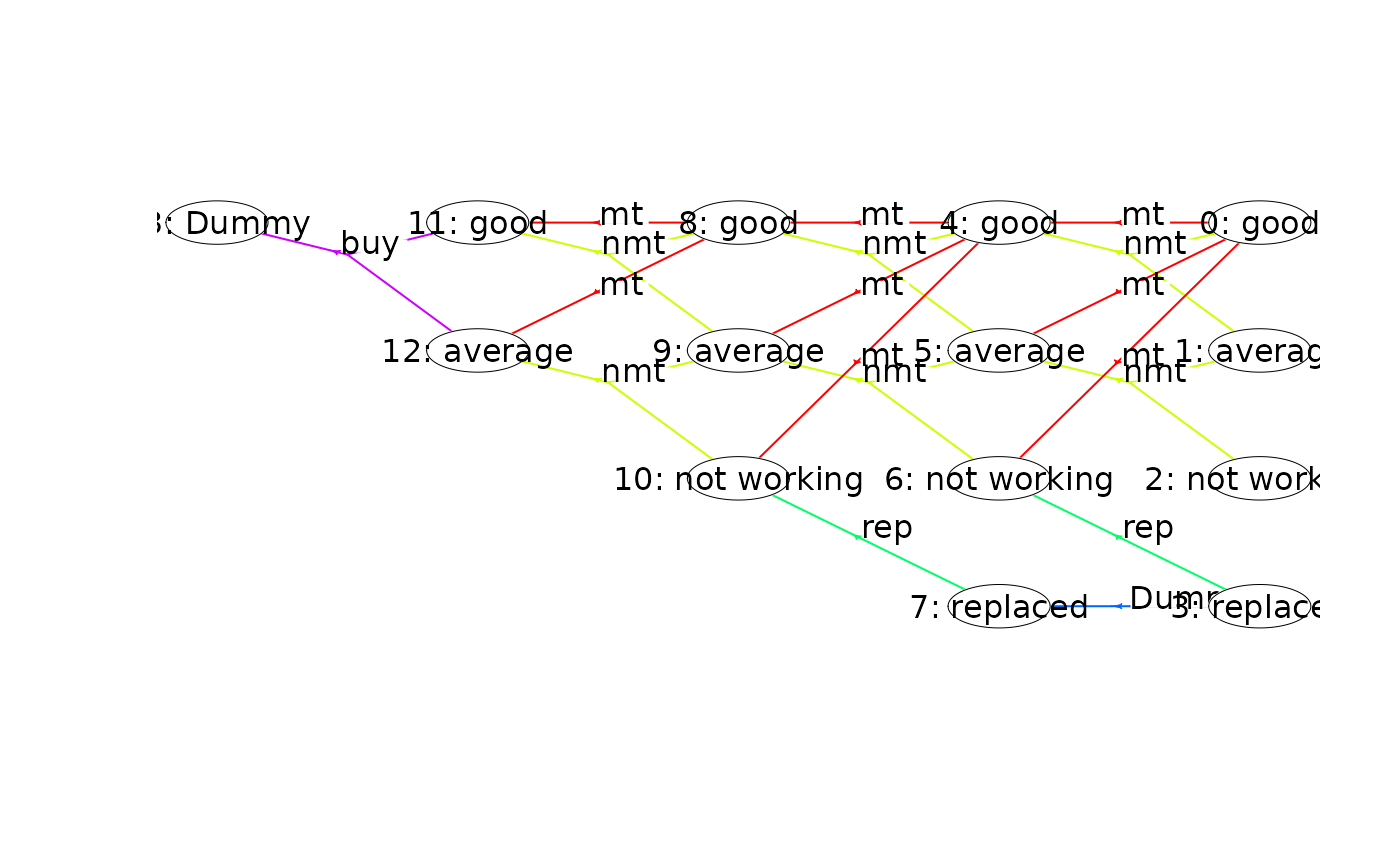
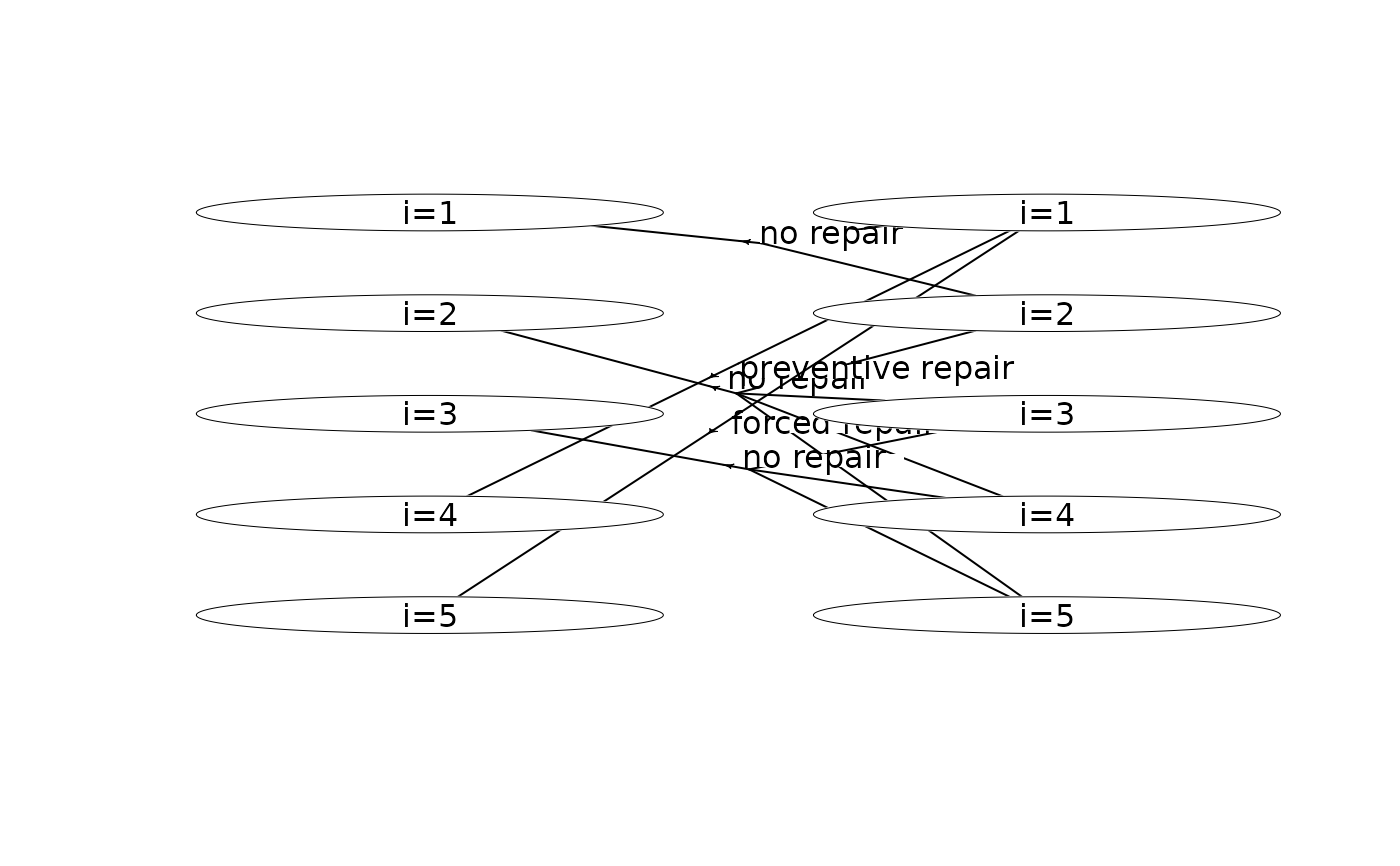
 plot(mdp, action_color = "label", state_label = "s_id|label") # state labels are 's_id | label'
plot(mdp, action_color = "label", state_label = "s_id|label") # state labels are 's_id | label'
 run_policy_ite_ave(mdp,"Net reward","Duration")
#> Run policy iteration under average expected-weight Bellman operator using
#> weight 'Net reward' over 'Duration'. Iterations (g):
#> 1 (-0.512821) 2 (-0.446154) 3 (-0.43379) 4 (-0.43379) finished. Cpu time: 1.172e-06 sec.
#> [1] -0.43379
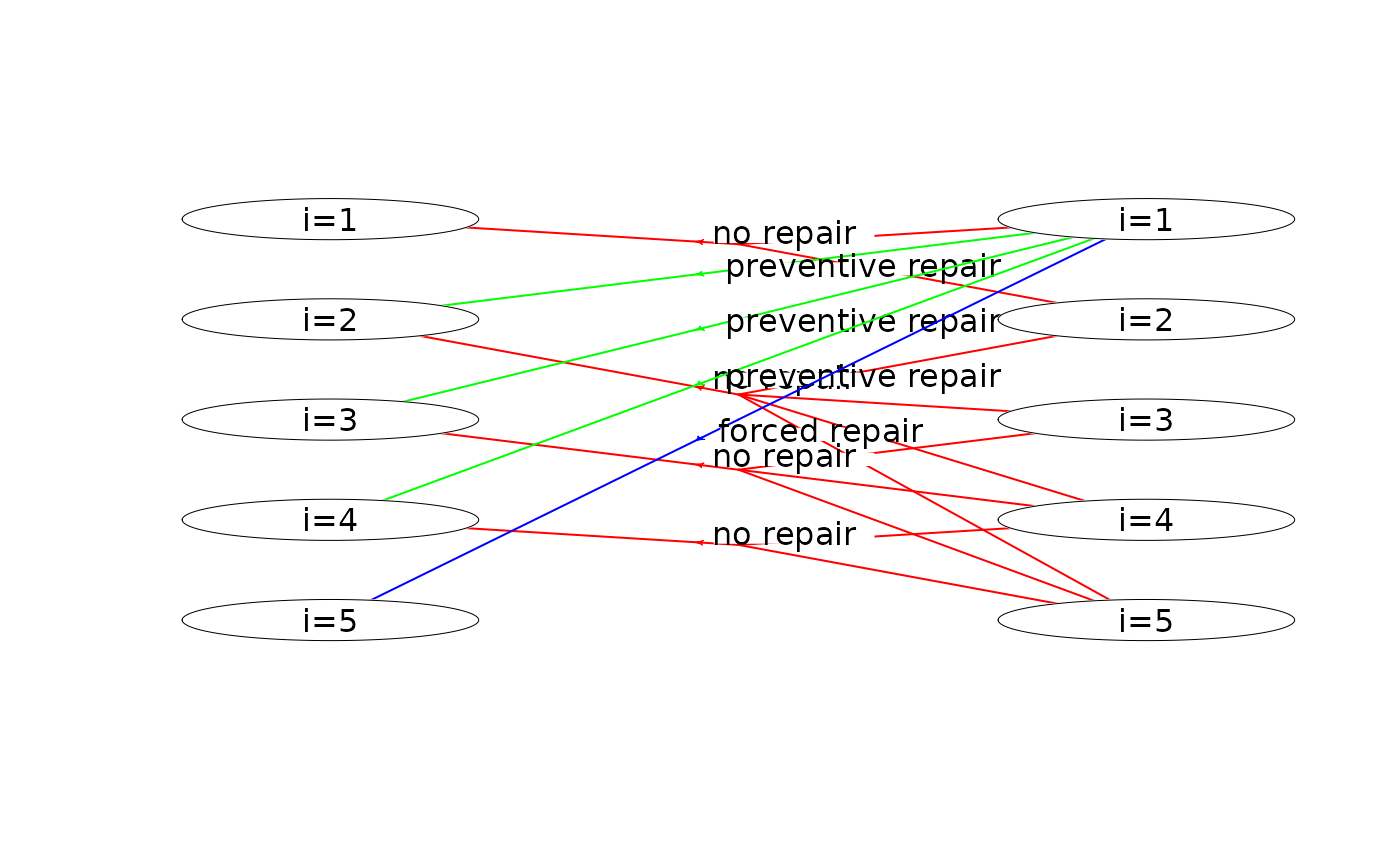
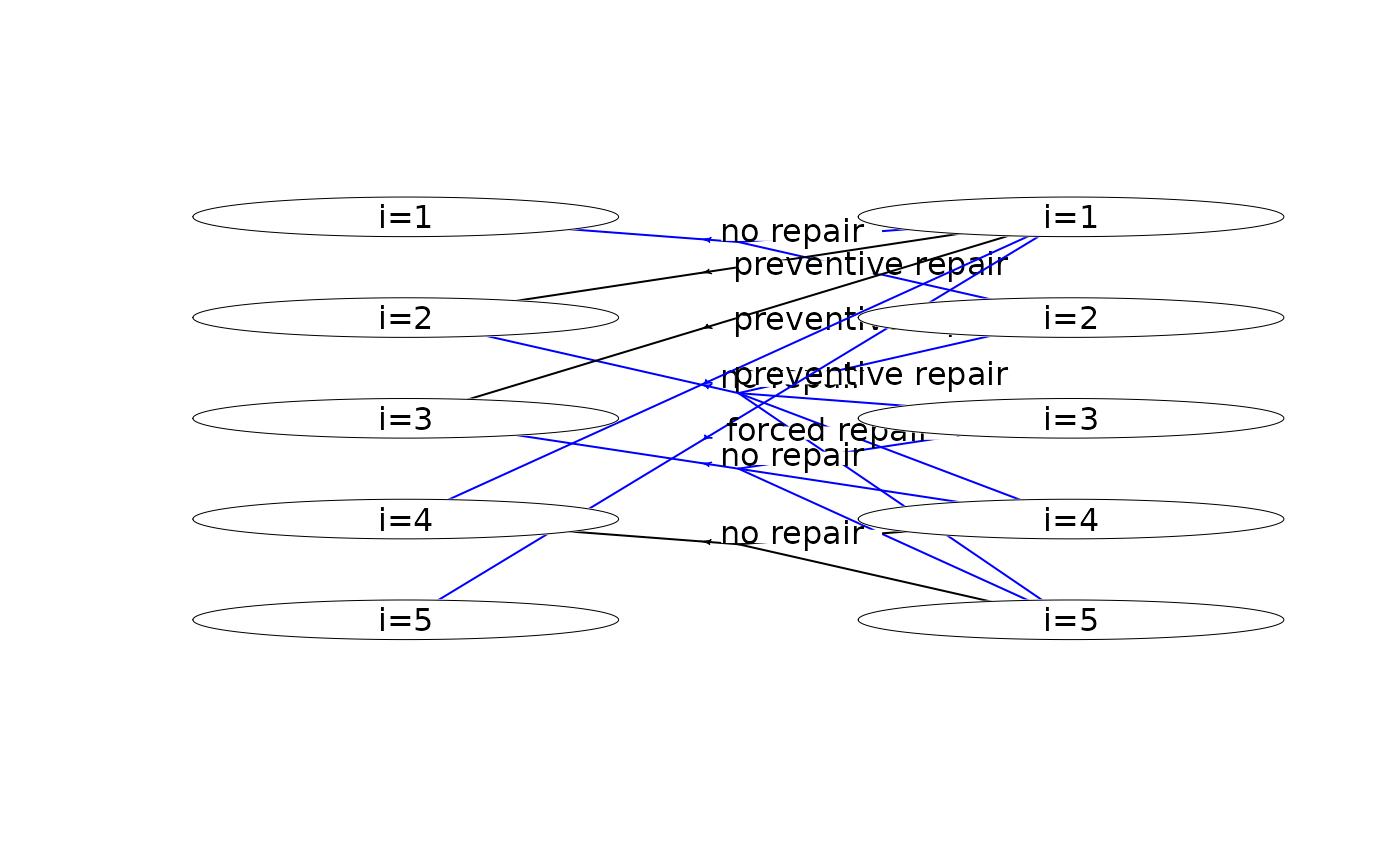
plot(mdp, action_color = "policy") # highlight optimal policy
run_policy_ite_ave(mdp,"Net reward","Duration")
#> Run policy iteration under average expected-weight Bellman operator using
#> weight 'Net reward' over 'Duration'. Iterations (g):
#> 1 (-0.512821) 2 (-0.446154) 3 (-0.43379) 4 (-0.43379) finished. Cpu time: 1.172e-06 sec.
#> [1] -0.43379
plot(mdp, action_color = "policy") # highlight optimal policy
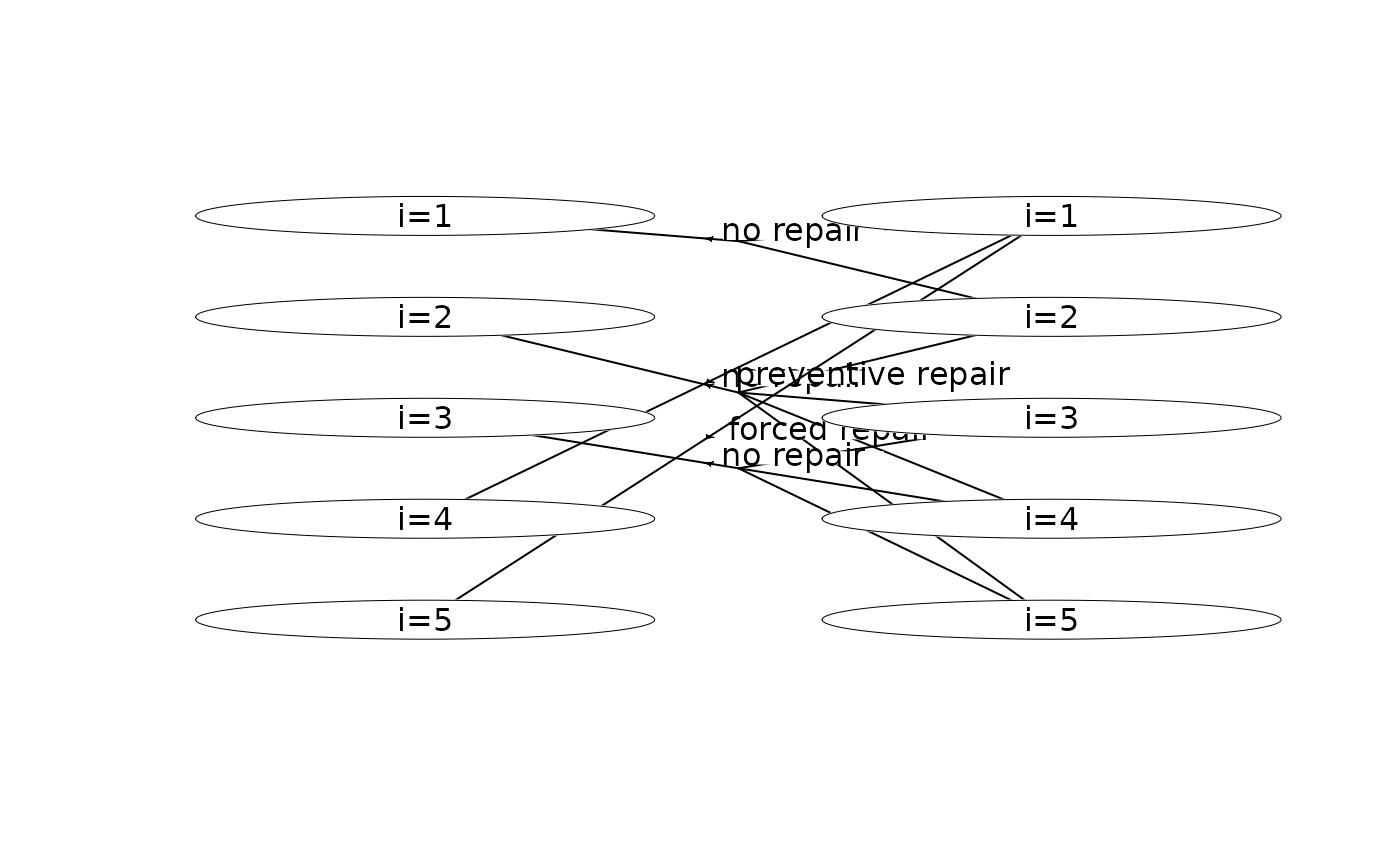
 plot(mdp, actions_visible = "policy") # show only optimal policy
plot(mdp, actions_visible = "policy") # show only optimal policy
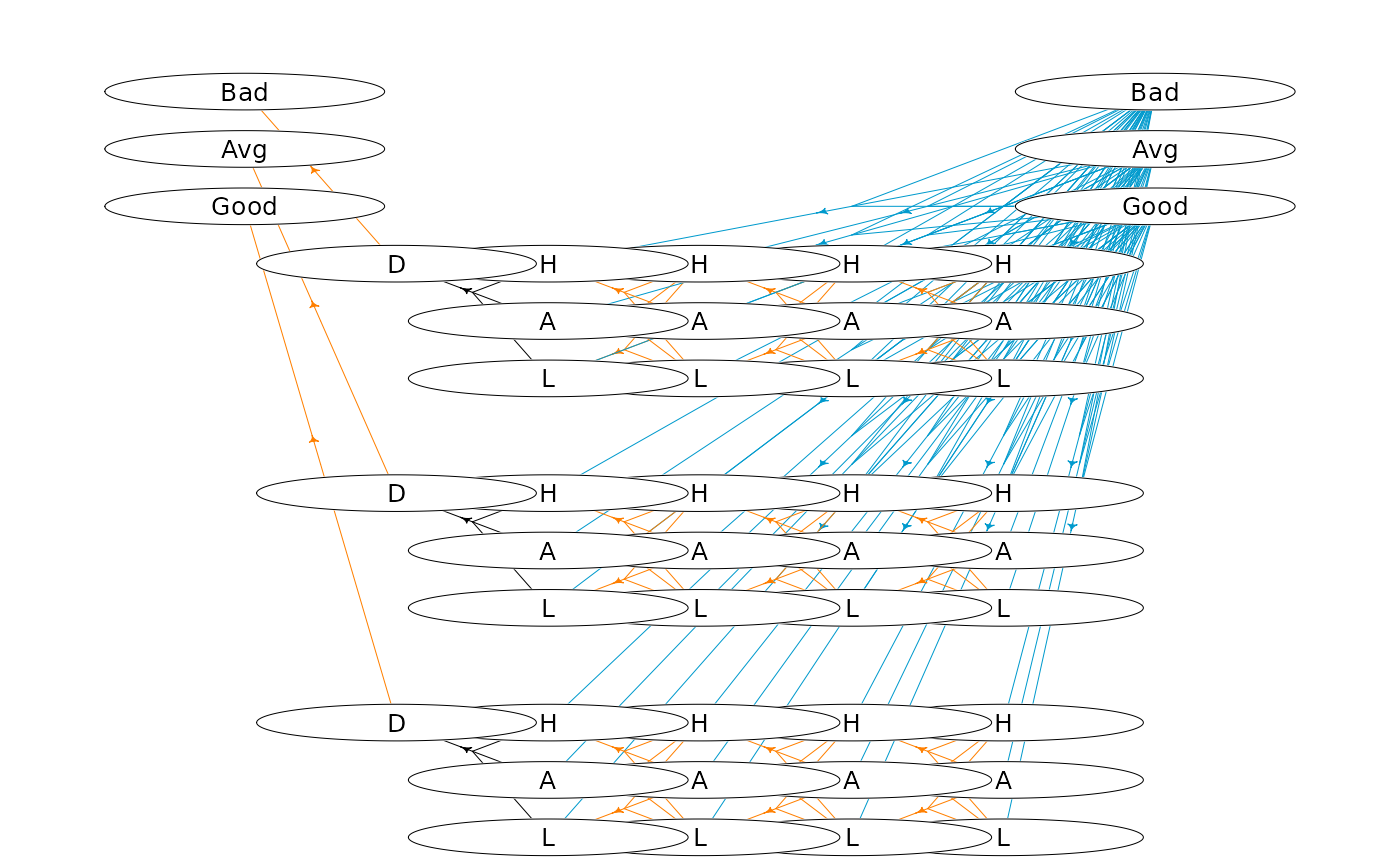
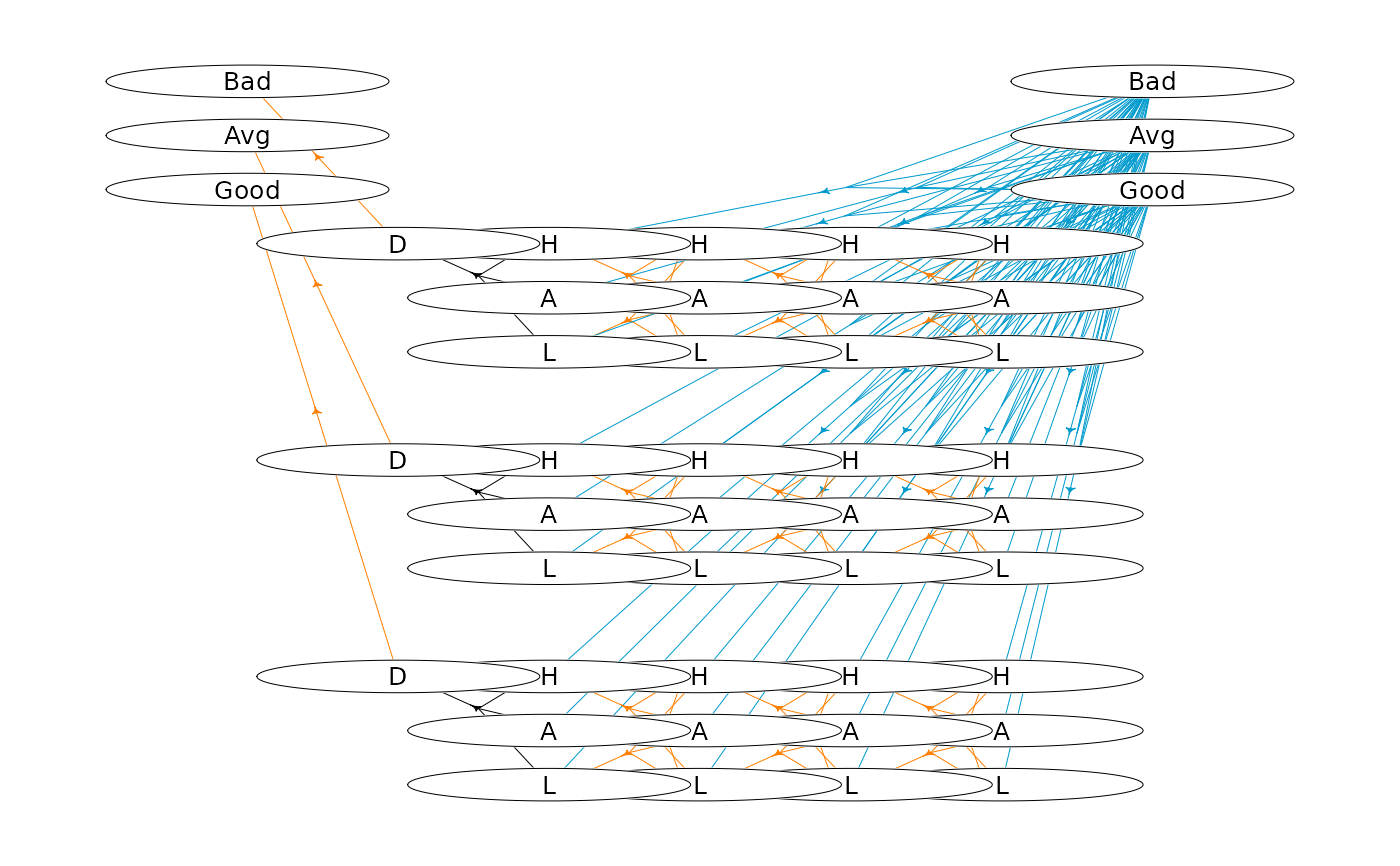
 #### An infinite-horizon hierarchical replacement problem ####
library(magrittr)
mdp<-load_mdp("cow_")
#> Read binary files (0.000227864 sec.)
#> Build the HMDP (0.000181944 sec.)
#> Checking MDP and found no errors (4.697e-06 sec.)
hgf <- get_hypergraph(mdp)
# modify labels
dat <- hgf$nodes %>%
dplyr::mutate(label = dplyr::case_when(
label == "Low yield" ~ "L",
label == "Avg yield" ~ "A",
label == "High yield" ~ "H",
label == "Dummy" ~ "D",
label == "Bad genetic level" ~ "Bad",
label == "Avg genetic level" ~ "Avg",
label == "Good genetic level" ~ "Good",
TRUE ~ "Error"
))
# assign nodes to grid ids
dat$g_id[1:3]<-85:87
dat$g_id[43:45]<-1:3
get_g_id<-function(process,stage,state) {
if (process==0) start=18
if (process==1) start=22
if (process==2) start=26
return(start + 14 * stage + state)
}
idx<-43
for (process in 0:2)
for (stage in 0:4)
for (state in 0:2) {
if (stage==0 & state>0) break
idx<-idx-1
#cat(idx,process,stage,state,get_g_id(process,stage,state),"\n")
dat$g_id[idx]<-get_g_id(process,stage,state)
}
hgf$nodes <- dat
# modify labels
dat <- hgf$hyperarcs %>%
dplyr::mutate(label = dplyr::case_when(
label == "Replace" ~ "R",
label == "Keep" ~ "K",
label == "Dummy" ~ "D",
TRUE ~ "Error"
),
col = dplyr::case_when(
label == "R" ~ "deepskyblue3",
label == "K" ~ "darkorange1",
label == "D" ~ "black",
TRUE ~ "Error"
),
lwd = 0.5,
label = ""
)
hgf$hyperarcs <- dat
# plot hypergraph
oldpar <- par(mai = c(0, 0, 0, 0))
plot_hypergraph(grid_dim = c(14, 7), hgf, cex = 0.8, radx = 0.02, rady = 0.03)
#### An infinite-horizon hierarchical replacement problem ####
library(magrittr)
mdp<-load_mdp("cow_")
#> Read binary files (0.000227864 sec.)
#> Build the HMDP (0.000181944 sec.)
#> Checking MDP and found no errors (4.697e-06 sec.)
hgf <- get_hypergraph(mdp)
# modify labels
dat <- hgf$nodes %>%
dplyr::mutate(label = dplyr::case_when(
label == "Low yield" ~ "L",
label == "Avg yield" ~ "A",
label == "High yield" ~ "H",
label == "Dummy" ~ "D",
label == "Bad genetic level" ~ "Bad",
label == "Avg genetic level" ~ "Avg",
label == "Good genetic level" ~ "Good",
TRUE ~ "Error"
))
# assign nodes to grid ids
dat$g_id[1:3]<-85:87
dat$g_id[43:45]<-1:3
get_g_id<-function(process,stage,state) {
if (process==0) start=18
if (process==1) start=22
if (process==2) start=26
return(start + 14 * stage + state)
}
idx<-43
for (process in 0:2)
for (stage in 0:4)
for (state in 0:2) {
if (stage==0 & state>0) break
idx<-idx-1
#cat(idx,process,stage,state,get_g_id(process,stage,state),"\n")
dat$g_id[idx]<-get_g_id(process,stage,state)
}
hgf$nodes <- dat
# modify labels
dat <- hgf$hyperarcs %>%
dplyr::mutate(label = dplyr::case_when(
label == "Replace" ~ "R",
label == "Keep" ~ "K",
label == "Dummy" ~ "D",
TRUE ~ "Error"
),
col = dplyr::case_when(
label == "R" ~ "deepskyblue3",
label == "K" ~ "darkorange1",
label == "D" ~ "black",
TRUE ~ "Error"
),
lwd = 0.5,
label = ""
)
hgf$hyperarcs <- dat
# plot hypergraph
oldpar <- par(mai = c(0, 0, 0, 0))
plot_hypergraph(grid_dim = c(14, 7), hgf, cex = 0.8, radx = 0.02, rady = 0.03)
 par(oldpar)
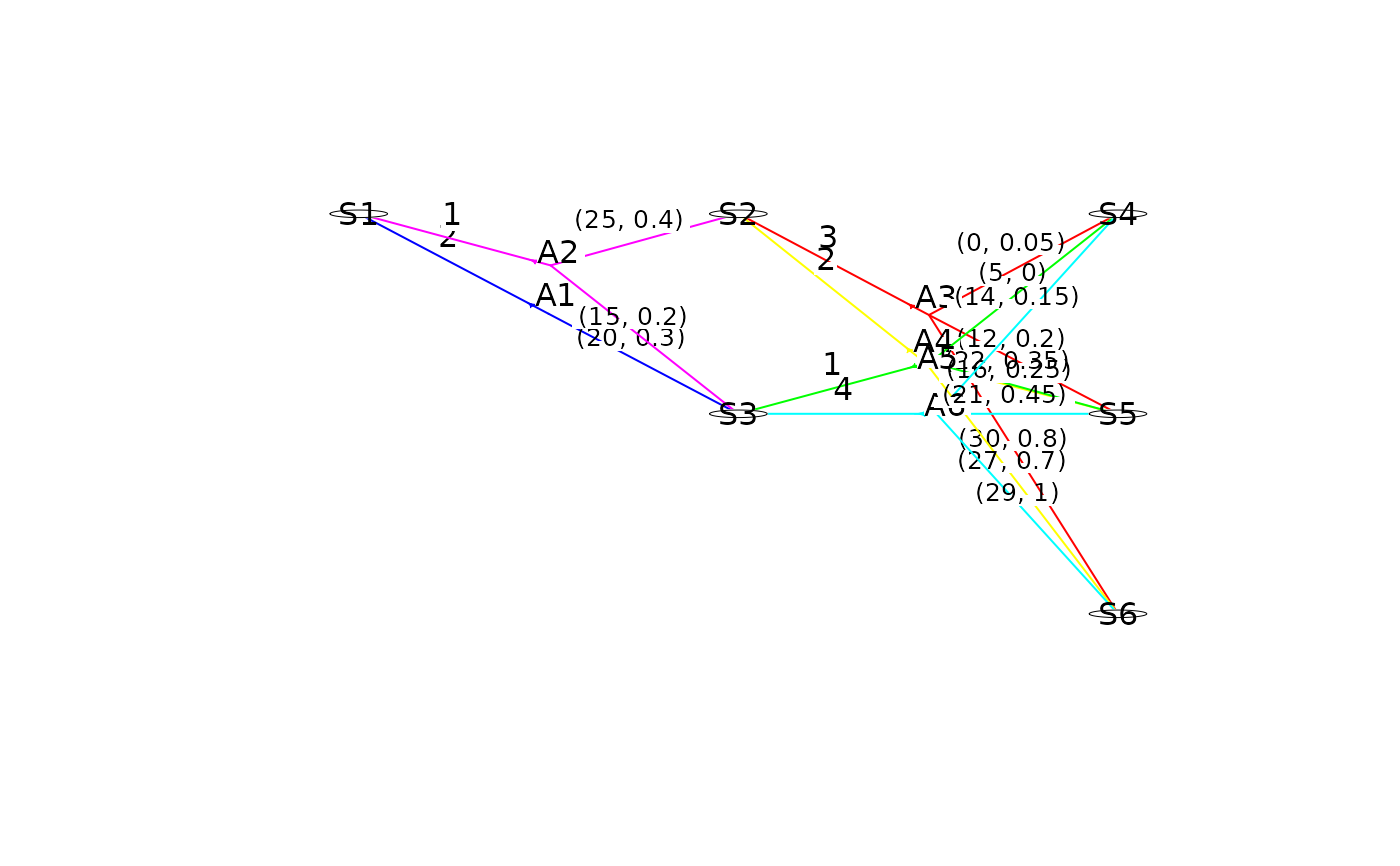
## A simple finite-horizon MDP with action and transition weights
prefix <- file.path(tempdir(), "plot_transition_rewards_")
w <- binary_mdp_writer(prefix)
w$set_weights("Cost")
w$set_trans_weights(c("Reward", "Disease"))
w$process()
w$stage()
w$state(label = "S1")
w$action(
label = "A1", weights = 2, id = c(1), pr = c(1),
trans_weights = c(20, 0.3), end = TRUE
)
w$action(
label = "A2", weights = 1, id = c(0, 1), pr = c(0.3, 0.7),
trans_weights = c(25, 0.4, 15, 0.2), end = TRUE
)
w$end_state()
w$end_stage()
w$stage()
w$state(label = "S2")
w$action(
label = "A3", weights = 3, id = c(0, 1, 2), pr = c(0.5, 0.3, 0.2),
trans_weights = c(0, 0.05, 12, 0.2, 30, 0.8), end = TRUE
)
w$action(
label = "A4", weights = 2, id = c(1, 2), pr = c(0.6, 0.4),
trans_weights = c(22, 0.35, 27, 0.7), end = TRUE
)
w$end_state()
w$state(label = "S3")
w$action(
label = "A5", weights = 1, id = c(0, 1), pr = c(0.4, 0.6),
trans_weights = c(5, 0, 16, 0.25), end = TRUE
)
w$action(
label = "A6", weights = 4, id = c(0, 1, 2), pr = c(0.1, 0.3, 0.6),
trans_weights = c(14, 0.15, 21, 0.45, 29, 1), end = TRUE
)
w$end_state()
w$end_stage()
w$stage()
w$state(label = "S4", end = TRUE)
w$state(label = "S5", end = TRUE)
w$state(label = "S6", end = TRUE)
w$end_stage()
w$end_process()
w$close_writer()
#>
#> Statistics:
#> states : 6
#> actions: 6
#> weights: 1
#>
#> Closing binary MDP writer.
#>
mdp <- load_mdp(prefix, get_log = FALSE)
plot(mdp, action_color = "label", trans_labels = "weights", action_w_label = "weight",
radx = 0.005, rady = 0.01)
par(oldpar)
## A simple finite-horizon MDP with action and transition weights
prefix <- file.path(tempdir(), "plot_transition_rewards_")
w <- binary_mdp_writer(prefix)
w$set_weights("Cost")
w$set_trans_weights(c("Reward", "Disease"))
w$process()
w$stage()
w$state(label = "S1")
w$action(
label = "A1", weights = 2, id = c(1), pr = c(1),
trans_weights = c(20, 0.3), end = TRUE
)
w$action(
label = "A2", weights = 1, id = c(0, 1), pr = c(0.3, 0.7),
trans_weights = c(25, 0.4, 15, 0.2), end = TRUE
)
w$end_state()
w$end_stage()
w$stage()
w$state(label = "S2")
w$action(
label = "A3", weights = 3, id = c(0, 1, 2), pr = c(0.5, 0.3, 0.2),
trans_weights = c(0, 0.05, 12, 0.2, 30, 0.8), end = TRUE
)
w$action(
label = "A4", weights = 2, id = c(1, 2), pr = c(0.6, 0.4),
trans_weights = c(22, 0.35, 27, 0.7), end = TRUE
)
w$end_state()
w$state(label = "S3")
w$action(
label = "A5", weights = 1, id = c(0, 1), pr = c(0.4, 0.6),
trans_weights = c(5, 0, 16, 0.25), end = TRUE
)
w$action(
label = "A6", weights = 4, id = c(0, 1, 2), pr = c(0.1, 0.3, 0.6),
trans_weights = c(14, 0.15, 21, 0.45, 29, 1), end = TRUE
)
w$end_state()
w$end_stage()
w$stage()
w$state(label = "S4", end = TRUE)
w$state(label = "S5", end = TRUE)
w$state(label = "S6", end = TRUE)
w$end_stage()
w$end_process()
w$close_writer()
#>
#> Statistics:
#> states : 6
#> actions: 6
#> weights: 1
#>
#> Closing binary MDP writer.
#>
mdp <- load_mdp(prefix, get_log = FALSE)
plot(mdp, action_color = "label", trans_labels = "weights", action_w_label = "weight",
radx = 0.005, rady = 0.01)
 ## Reset working dir
setwd(wd)
## Reset working dir
setwd(wd)